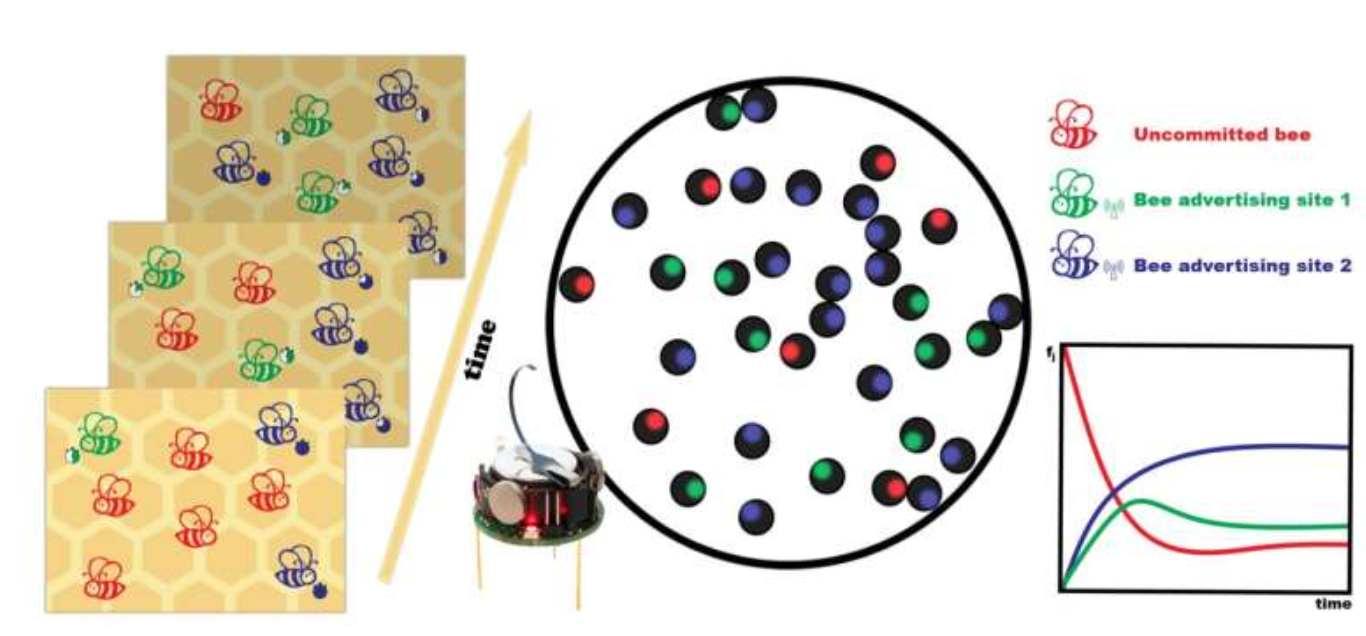
"꿀벌 춤을 모방한 미니 로봇: 의사결정을 위한 혁신적인 모델" 바르셀로나 대학교의 연구원들은 획기적인 연구를 통해 꿀벌이라는 예상치 못한 출처에서 영감을 얻었습니다. 이 윙윙거리는 곤충의 복잡한 집단 행동과 의사 결정 과정은 탈중앙화된 합의 형성을 탐구하기 위해 킬로봇으로 알려진 미니 로봇 군집의 청사진이 되었습니다. 이전에 물고기 떼의 리더십과 새 떼의 사회적 상호작용을 연구한 바 있는 카르멘 미구엘 교수가 이끄는 연구팀은 LED 조명, 작은 다리, 적외선 수신기, 영화 '펄프 픽션'의 유명한 존 트라볼타에게서 영감을 받은 춤 동작을 갖춘 35개의 킬로봇을 프로그래밍했습니다(비록 규모는 작지만). 목표는 벌들 간의 상호 작용, 특히 정찰 벌이 잠재적인 벌집 위치를 발견할 때 수행하는 '개글 댄스'를 ..